OAK FFC-4P
A modular FFC vision platform for custom stereo baselines, synced sensors, and on-device processing in robotics flexible and advanced robotic applications.
125 ms
Teleoperation latency.
60 FPS
Synchronized stereo video streams.
A modular FFC vision platform for custom stereo baselines, synced sensors, and on-device processing in robotics flexible and advanced robotic applications.
Teleoperation latency.
Synchronized stereo video streams.
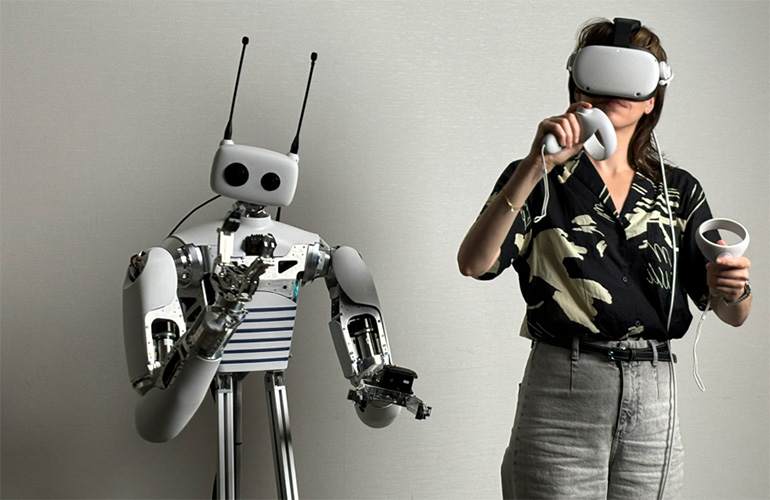
Pollen Robotics develops open-source robots, including Reachy 2, a modular humanoid platform designed for research, intuitive human-robot interaction, and AI experimentation. With VR teleoperation, users can guide Reachy 2 by demonstration for applications in education, assistive robotics, and embodied AI.

To enable seamless VR-based control, Reachy needs a stereo vision system with human-like depth perception, requiring a 64 mm baseline, synchronized high frame rates, ultra-low latency streaming, and real-time processing. Existing stereo modules were too rigid or underpowered to meet these requirements.

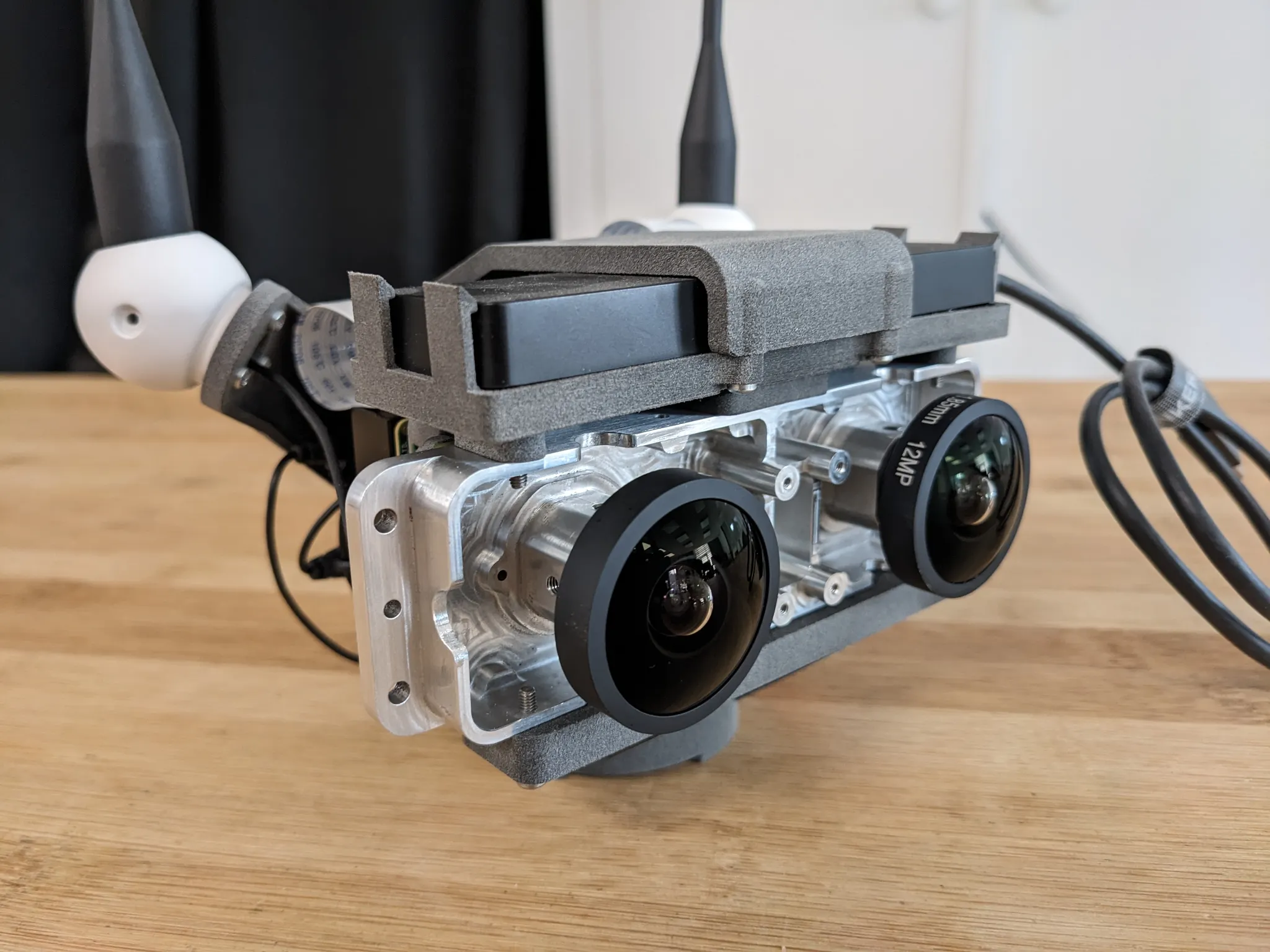
Pollen built a custom stereo vision system using the Luxonis FFC-4P, paired with dual IMX296 RGB sensors and fisheye lenses mounted at a human-like baseline. The system outputs two synchronized 60 FPS video streams, stereo-rectified and compressed on-device with DepthAI. H.264 is transmitted via WebRTC to VR, while JPEG frames stream into ROS 2 for logging and training.
Luxonis enabled a modular, developer-friendly vision stack that met strict teleoperation requirements.
Modular hardware lets Pollen choose sensors, lenses, and baseline for human-like stereo.
On-device rectification and compression reduce system complexity and latency.
ROS and Python support made integration fast and scalable to autonomy workflows.
The FFC-4P foundation delivers ultra-low-latency teleoperation today and structured depth data for autonomous behavior tomorrow.
A modular FFC vision platform for custom stereo baselines, synced sensors, and on-device processing in robotics flexible and advanced robotic applications.
Pollen Robotics builds Reachy 2, a programmable humanoid robot designed for intuitive human-robot interaction and embodied AI research.